携帯電話・情報端末用
概要
フィーリングフィンガ
携帯電話や情報端末のキーのクリック感覚を人間の指先に代わり自動で検査する小型3軸ロボットです。
いままでは、人間がキーを押し、指先の感覚で判断していたクリック感覚を自動で検査します。
携帯電話の出荷感応試験や、キーのフィーリング試験に最適です。コントロールは、パソコンからのUSB通信で行います。

特長
1)移動部にボールネジを使用しているため耐久性が高い。
2)携帯電話のキー位置情報はファイル化されているので機種ファイルを選択することで実行出来ます。
3)コンパクトサイズで設置場所を選びません、パソコンの横で作業が出来ます。
4)クリック感覚センサーに高性能フォースセンサーを使用しております。
5)制御は、パソコンからのUSBで行うので、どんな場所でも駆動出来ます。
6)手動実行やティーチング動作は、オートフィンガーエディタで行います。
装置仕様
| 動作範囲 | X=150 Y=150 Z=30 (mm) |
| 最大速度 | X・Y=80・Z=30(mm/sec) ※ただし80mm移動時の速度 |
| 位置決め精度 | X・Y=0.2 mm:Z=0.2 mm |
| 耐久性 | X・Y・Z =距離換算 500Km |
| 駆動方式 | X・Y・Z共ステッピングモーター(オープンループ) |
| 駆動機構 | X・Y・Z共移動は、ボールネジでガイドはリニアーベアリング使用。 |
| ティーチングの方式 | パソコン画面上でのマニュアル操作画面から行います。 |
| 騒音 | 30db程度 |
| PCI/F | USB(COM) |
| 外形寸法・重量 | W=440 D=520 H≒400 (mm) 重量=20Kg |
| 電源 | AC95~220V 100VA |
オプション仕様
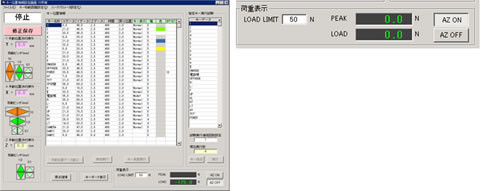
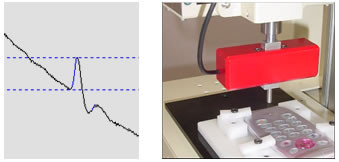
写真左:計測画面 写真右:ティーチング画面
※仕様・寸法は予告なく変更する場合があります。